












Design Drives Innovation
We are convinced that design has the power to detect emerging needs, ask the right questions and thus, drive innovation.
DesignFarmBerlin provides grants for design-driven start-ups and female founders, combined with a tailored mentorship program – all you need to grow on the fertile grounds of Berlin‘s creative tech scene during the seed phase.
Design heißt Innovation
Wir sind davon überzeugt dass Design die Kraft hat, aufkommende Bedürfnisse zu erkennen, die richtigen Fragen zu stellen und so Innovationen voranzutreiben.
DesignFarmBerlin bietet Stipendien für Gründerungen im Design, kombiniert mit einem maßgeschneiderten Mentoring-Programm – alles, was Du brauchst, um in der Seed-Phase auf dem fruchtbaren Boden der kreativen Szene Berlins zu wachsen.
Join the mission
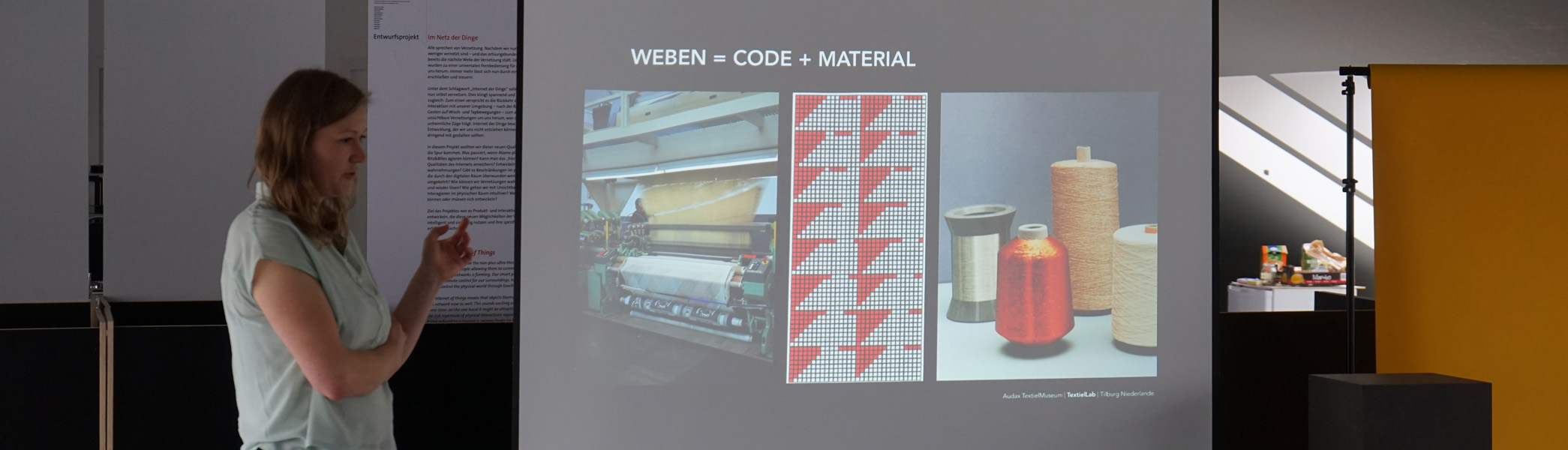
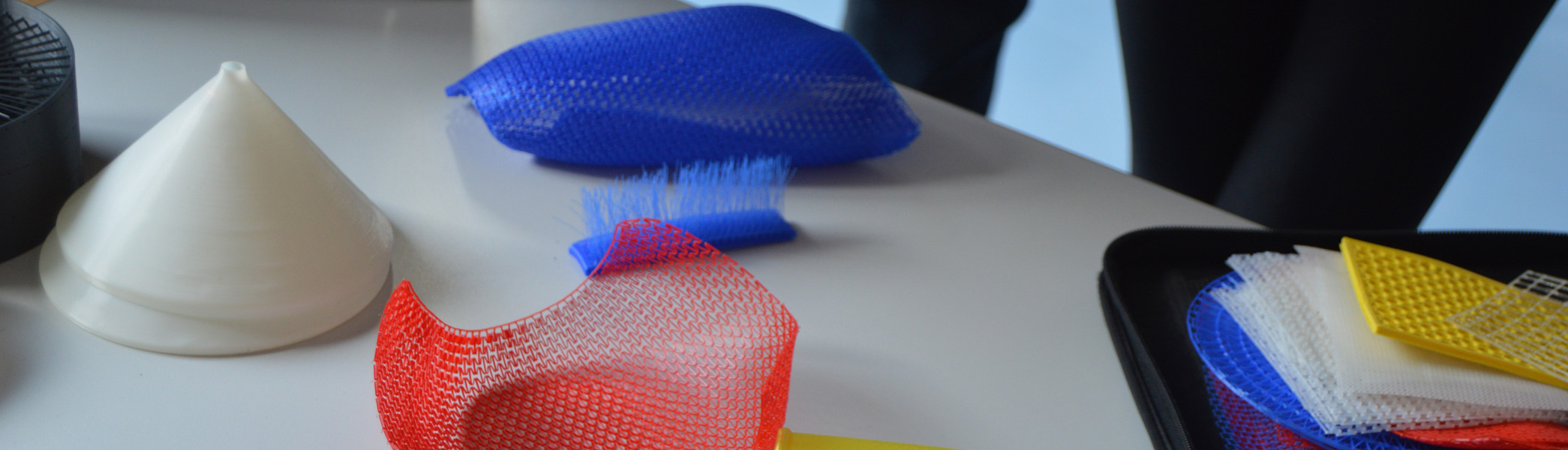
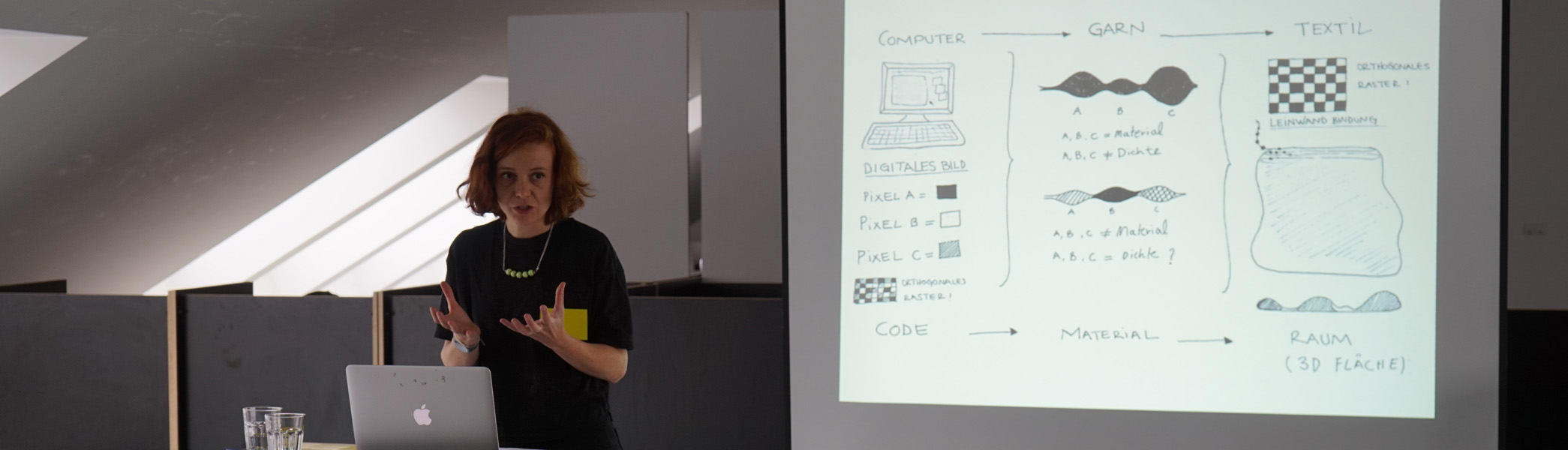
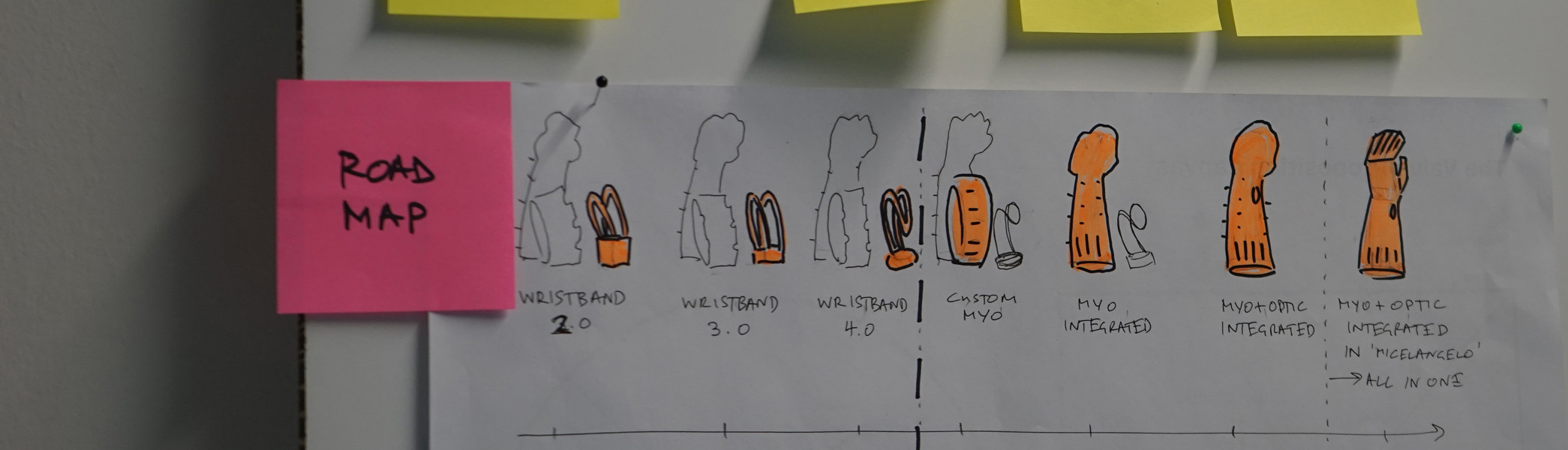
DesignFarmBerlin is an initiative of the weißensee school of art and design. We feel very fortunate to be able to give design a distinct voice and to empower a new generation of creative people. We funded a variety of start-ups and entrepreneurs in the field of health, interaction, textiles, fashion and music, gradually extending its scope to systemic innovations.
Join us on this mission and discover what design-driven innovation is all about.
Unsere Mission
DesignFarmBerlin ist eine Initiative der weißensee kunsthochschule Berlin. Wir bieten eine starke Plattform und wir helfen kreative Potentiale zu entfalten.
Wir haben bereits eine Vielzahl von Designer_innen in den Bereichen Gesundheit, Interaktion, Textilien, Mode und Musik, bis zu Systeminnovationen, gefördert. Unterstützen Sie uns bei unserer Mission und erfahren Sie, was Innovation alles bedeutet.

Contact
info[at]designfarmberlin.de
+49 30 47705 410


